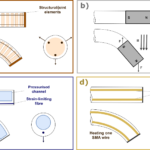
Developed by the engineer Gilles Decroly, Softendo focuses on the realization of “smart materials” that allow complex, remotely controlled movements.
A technology designed to improve the management of endoscopic-treated diseases by natural ways.
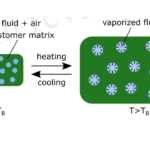
This research was the subject of an article ” Optimization of Phase-Change Material-Elastomer Composite and Integration in Kirigami-Inspired Voxel-Based Actuators ” in Frontiers Robotics.
It describes the study and optimization of an active material that could be used to manufacture flexible robots able of performing complex tasks.