SOFTENDO : un projet des équipes « Ingénieurs-Médecins »
SOFTENDO : un projet des équipes « Ingénieurs-Médecins »Cécile2023-04-26T22:00:21+02:00
Le Projet Softendo
Développé par I’ingénieur Gilles Decroly, Softendo se focalise sur la réalisation de tubes dits « intelligents » qui permettent des mouvements complexes commandés à distance.
Une technologie conçue dans le but d’améliorer la prise en charge des maladies traitées grâce l’endoscopie par les voies naturelles.
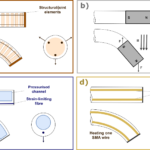
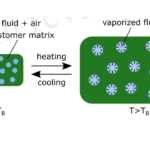
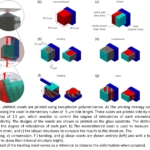
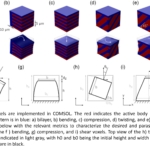
Cette recherche a fait l’objet d’un article intitulé » Optimization of Phase-Change Material-Elastomer Composite and Integration in Kirigami-Inspired Voxel-Based Actuators » dans la revue Frontiers Robotics.
Il décrit l’étude et l’optimisation d’un matériau actif qui pourrait servir à fabriquer des robots souples capables de réaliser des tâches complexes.
Gilles Decrolya défendu sa thèse de doctorat intitulée « Contributions to Soft Microrobotics: Advanced Kinematics Based on Digital Manufacturing of Active Materials and Pneumatic Actuation for Endoscopy »?
Le second a permis des avancées significatives pour développer les endoscopes du futur plus petits, plus maniables et plus facilement recyclables. La retransmission de cette défense est accessible via YOUTUBE
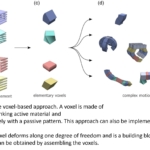
Nous avons le plaisir de vous annoncer la publication d’un nouvel article intitulé « A Voxel-Based Approach for the Generation of Advanced Kinematics at the Microscale » * de Gilles Decroly,* Adam Chafaï, Guillaume de Timary, Gabriele Gandolfo, Alain Delchambre, and Pierre Lambert
L’article présente une méthodologie de conception et de fabrication de microrobots souples basée sur des voxels. Un voxel est une structure élémentaire de quelques microns (le diamètre d’un cheveu) et capable de se déformer suivant un degré de liberté. Différents voxels peuvent être assemblés pour former une superstructure micrométrique capable de réaliser des mouvements complexes.