Dans la poursuite de sa thèse, Ramzi Ben Hassi vient de publier un article scientifique.
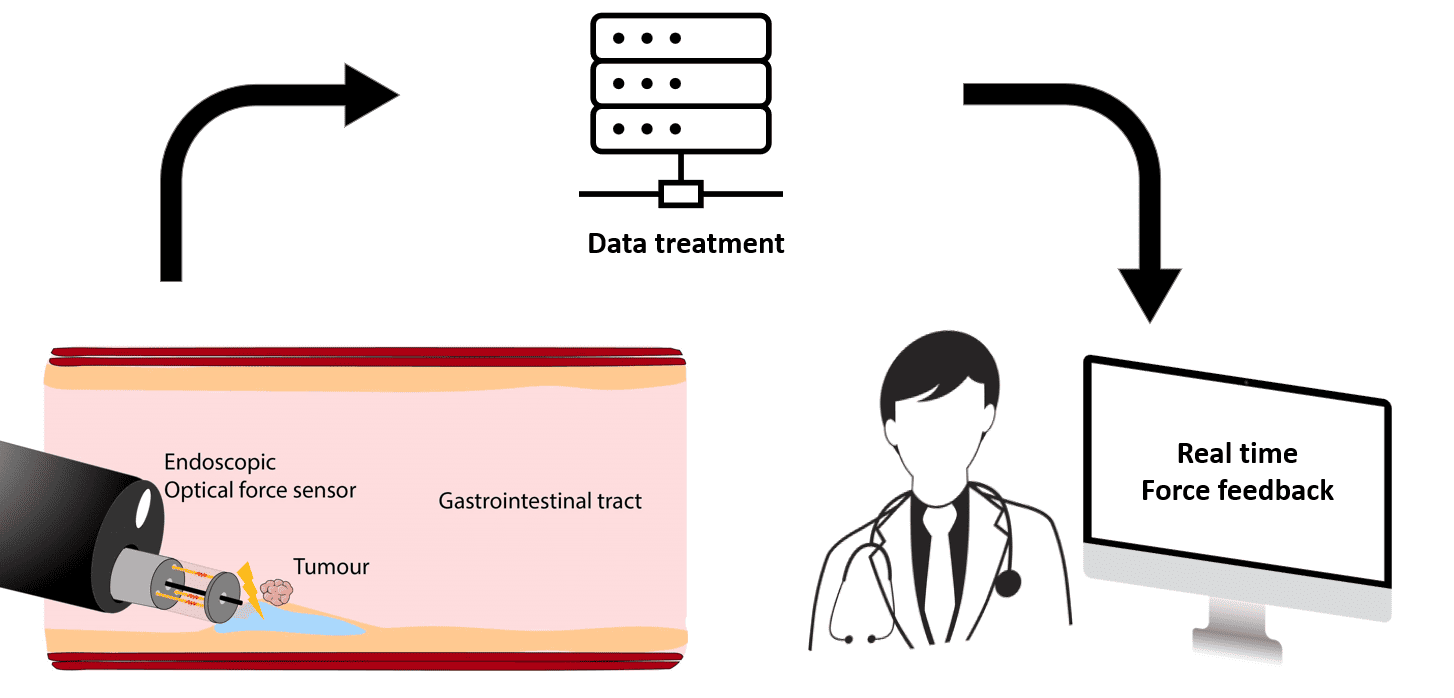
Ce travail a permis la réalisation d’un cathéter équipé d’un capteur de force optique pour assister le gastroentérologue dans la dissection de tumeurs du tube digestif par voie endoscopique (ESD) en l’informant des forces qu’il applique durant l’opération.
C’est une avancée qui, à terme, facilitera l’apprentissage de techniques endoscopiques avancées afin de contribuer à leur diffusion.
Cet article est accessible via ce LIEN

Abstract
Minimally invasive procedures have flourished in the last decades to treat patients with less trauma.
Therapeutic endoscopy is one these emerging techniques using flexible endoscopes through natural orifices to go beyond the simple diagnostic and enables the treatment of digestive tract disorders like early gastrointestinal tumors by the mean of advanced endoscopic techniques such as Endoscopic Submucosal Dissection (ESD).
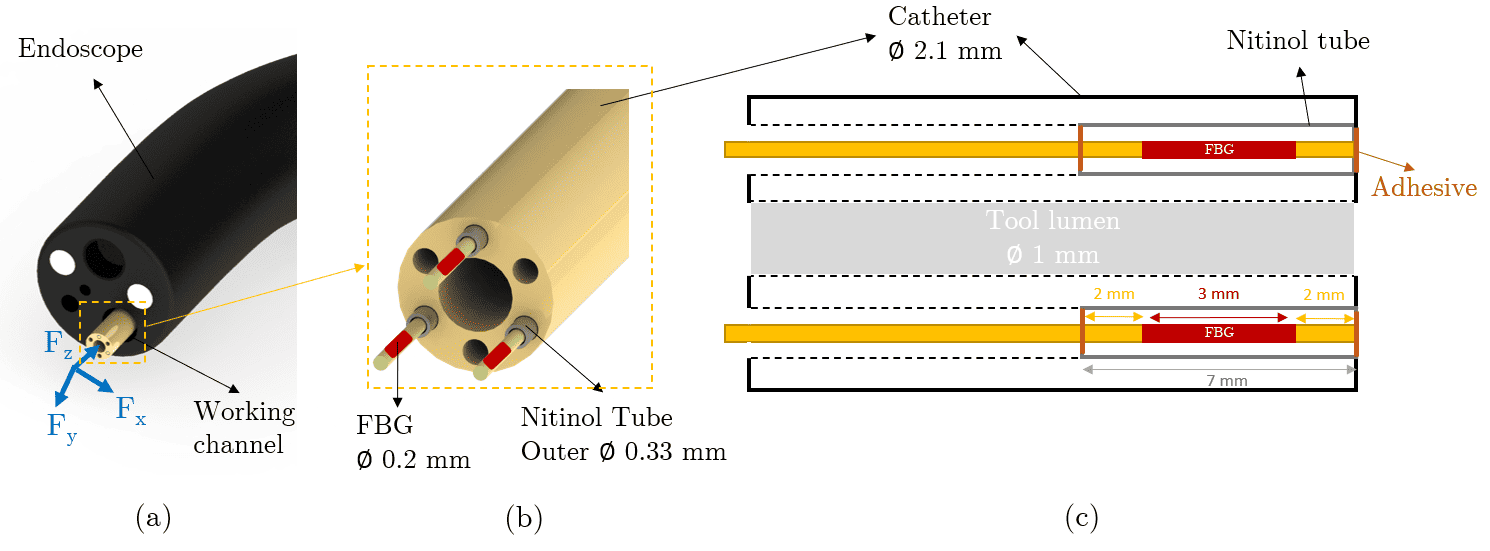
Despite renowned clinical benefits compared to other tumor resection techniques, ESD is a challenging procedure with a high level of expertise and dexterity needed to master it. Lack of expertise centers and training in Western countries makes the diffusion of ESD still limited. According to experts, a force-feedback technology directly integrated in the electrosurgical knife would help trainees to flatten their learning curve, especially on animal models. This thesis proposes to solve the problem by integrating Fiber Bragg Gratings (FBGs) as 3 degrees-of-freedom optical force sensors into the catheter of the electrosurgical knife aiming to measure Fx, Fy and Fz.
Several designs were explored to finally implement 3 FBGs placed circumferentially to the section of the catheter.
The use of nitinol tubes and a specific pasting method of the FBG led to better sensitivity and resolution.
A force calibration test bench was specifically designed to calibrate the force sensor in 30 3D spatial directions that cover most of its use cases. Non-linear regression models were implemented to tackle the non-linearities between the wavelength shifts of the FBGs and the forces applied, inherent to prototyping errors and imprecisions and non-linearity of the material.
A hybrid model made of mono- and bi-layered neural networks for the prediction of Fx and Fy and a support vector regression for the prediction of Fz was built and verified by using training and testing data set. The results are promising and satisfying most of the technical requirements.
A temperature compensation technique was tested and verified on a specific prototype with endoscopic dimensions. In parallel to the force sensor development, a force-feedback user interface was designed to display the three components of the force using polar coordinates for the lateral forces and concentric circles for the axial one.
A warning alarm was also implemented to prevent from critical event such as exceeding a force threshold.
Further works will mainly consist in the implementation of a temperature compensation technique directly in the design of the force sensor and the integration of the force-feedback interface with the force sensor in real-time ESD training settings.
Votre aide est précieuse.
En effectuant un geste financier, vous pouvez vraiement contribuer au développement de nouveaux dispositifs médicaux au service de toutes et tous.
Tout don est déductible dès 40 €/an ou 5 €/mois.
Merci de relayer l’information via vos canaux et via les réseaux sociaux