2022-06 Le projet Softendo : un étudiant chercheur soutenu par la Fondation
2022-06 Le projet Softendo : un étudiant chercheur soutenu par la Fondation
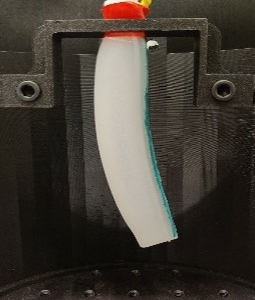
Les endoscopes « souples » sont proposés comme une alternative à leurs homologues traditionnels en raison de leur flexibilité et de leur taillepermettant l’accès à certaines zones vitales inatteignables autrement. Le travail de recherche a consisté à intégrer un capteur de déformation et de pression à l’endoscope de test.
Les résultats encourageants montrent que le modèle développé dans la recherche pourrait constituer la base d’un système de contrôle des endoscopes flexibles.
Ce travail, réalisé par Ibrahima Sow, s’est construit à partir de celui de Gilles Decroly qui en a assuré la supervision.
Le rapport de ce stage de recherche est accessible ICI.